Testflug und Resultate
Versuchsaufbau
Um eine Aussage über die Genauigkeit der vom vorgestellten System ermittelten Rehkitzkoordinaten machen zu können, wurde ein Testflug über Zieltafeln mit bekannten Koordinaten durchgeführt.
Als Ziele wurden 16 kreisrunde, blanke Aluminiumplatten mit einem Durchmesser von 30 cm verwendet. Diese reflektieren hauptsächlich den kalten Himmel und sind in Thermalbildern als schwarze Punkte erkennbar. Die Platten wurden in einem regelmässigen Raster von vier mal vier Platten ausgelegt. Die Lagekoordinaten der Platten entsprechen den Lagekoordinaten der in der Flugplanung verwendeten Wegpunkte. Die Absteckung und anschliessende Wiedereinmessung der Plattenpositionen erfolgte mit einem geodätischen GNSS-Empfänger unter Nutzung des Echtzeitpositionierungsdienstes swipos-GIS/GEO. Die so ermittelten Koordinaten haben eine Genauigkeit von wenigen Zentimetern und werden für die weitere Auswertung als fehlerfrei betrachtet. Sie bilden den wahren Wert oder die Sollkoordinate, mit der die später ermittelten Rehkitzpositionen verglichen werden.
Die Flugplanung erfolgte in der zum Falcon gehörenden Steuersoftware AscTec AutoPilot. Definiert wurde – wie in der Fotogrammetrie üblich, ein Streifenflugmuster, das in diesem Fall vier Streifen umfasst. Die Flughöhe wurde auf 30 m, die Querüberdeckung auf 60 % festgelegt. Das definierte Flugmuster wurde zweimal abgeflogen. Jeder Streifenflug nahm ungefähr 90 Sekunden reine Flugzeit in Anspruch.
Die Auswertung erfolgte vollumfänglich mit den beschriebenen Matlabanwendungen. Die Aluplatten wurden zunächst mit dem automatischen Detektionsalgorithmus gesucht. Anschliessend wurden in sämtlichen Thermalbildern nicht detektierte Aluplatten manuell hinzugefügt und falsch detektierte Punkte entfernt.
Resultate
Das Endresultat der Auswertung, die Mediankoordinaten aller Cluster, wurde mit den Sollkoordinaten der Aluplatten verglichen. Die errechneten Lageabweichungen sind in nachfolgender Tabelle aufgeführt:
| Flug 1 | Flug 2 | Flug 1 + 2 | |
| Root Mean Square Error | 1.96 m | 1.62 m | 1.81 m |
| Maximale Lageabweichung | 2.82 m | 2.32 m | 2.82 m |
| Minimale Lageabweichung | 0.91 m | 0.58 m | 0.58 m |
Werden die Abweichungen in einer zweidimensionalen Grafik betrachtet, so fällt auf, dass beinahe alle mittels Oktokopter ermittelten Koordinaten in südlicher und westlicher Richtung von den Sollkoordinaten abweichen, ungefähr jener Richtung, die der Falcon während des gesamten Fluges als Orientierung inne hatte. Diese Abweichung ist eindeutig systematisch und auf bislang unberücksichtigte Fehlereinflüsse zurückzuführen.
Welche Genauigkeitssteigerung durch die Elimination sämtlicher systematischer Fehlereinflüsse möglicherweise erreicht werden könnte, soll eine einfache Abschätzung zeigen. Es wird angenommen, dass die Summe aller systematischen Fehlereinflüsse auf die Lage zeitlich konstant als Mittelwert (2D-Vektor) der oben beschriebenen Lageabweichungen modelliert werden kann. Nach Abzug dieses Vektors verbleiben die in nachfolgender Tabelle aufgeführten Abweichungen.
| Flug 1 + 2 | |
| Root Mean Square Error | 0.98 m |
| Maximale Lageabweichung | 2.42 m |
| Minimale Lageabweichung | 0.18 m |
Der Root Mean Square Error wird um Faktor 1.8 von 1.81 m auf 0.98 m reduziert. Die verwendete Abschätzungsmethode berücksichtigt nicht die tatsächliche, komplexe Entstehungsweise der systematischen Fehler – dennoch wird das vorhandene Potential für Genauigkeitssteigerungen durch Elimination systematischer Fehlereinflüsse deutlich aufzeigt.
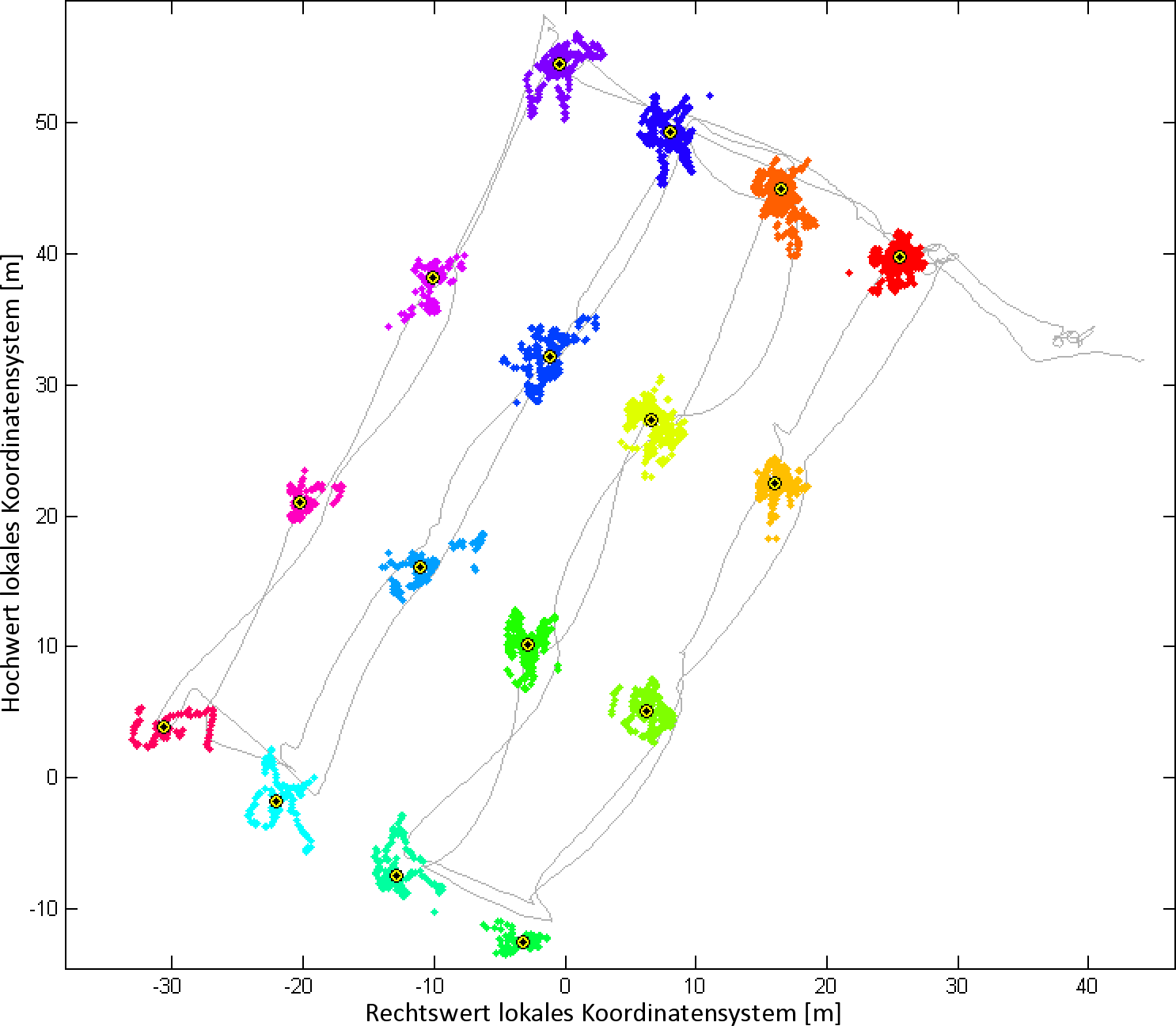
Flugpfad,Cluster und Mediankoordinaten Testflug
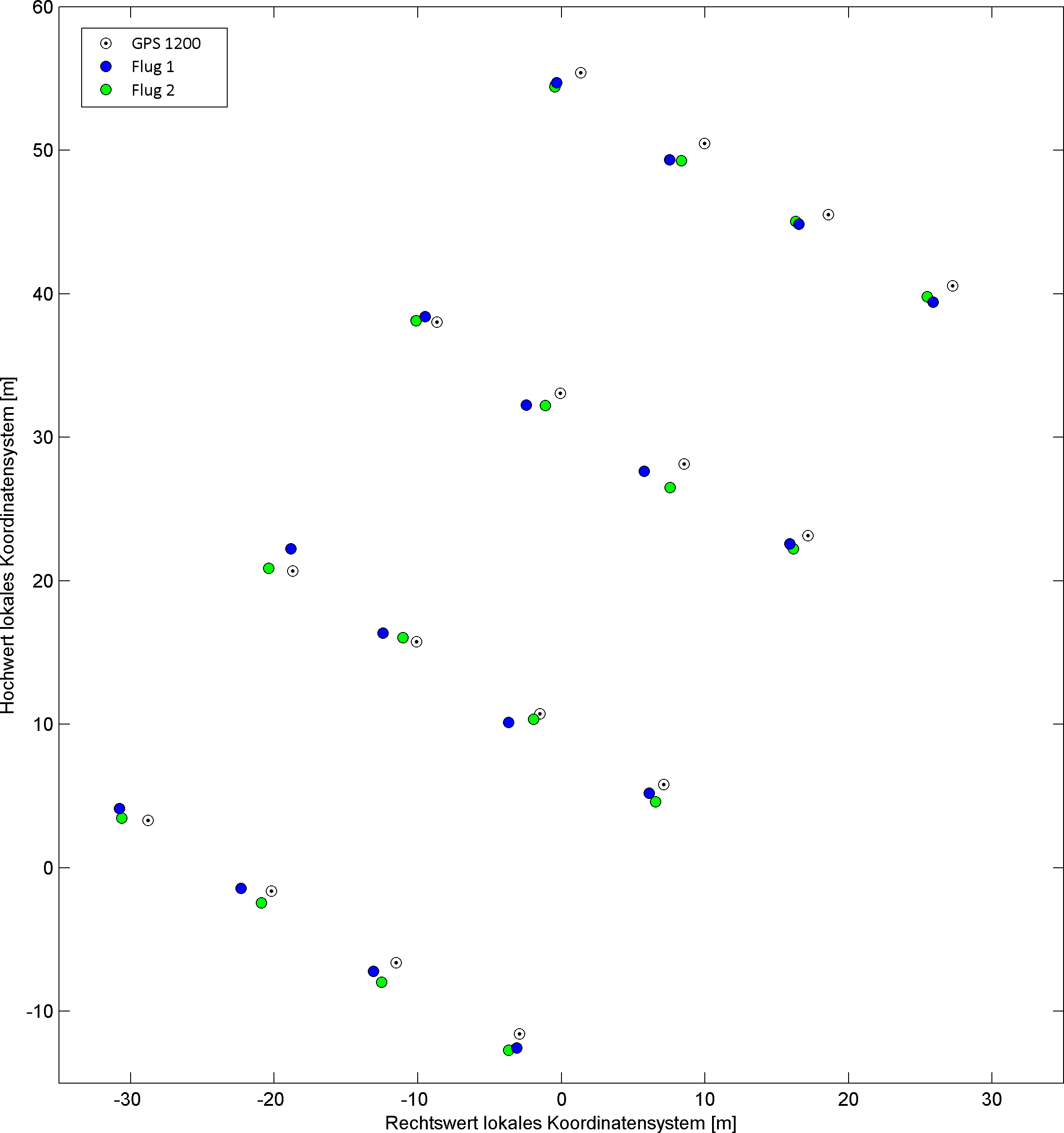
Vergleich Mediankoordinaten mit Sollkoordinaten