Umsetzung in Matlab
Zweck und Aufbau der Matlabanwendung
Für die Datenauswertung der von UAV und Thermalkamera gelieferten Daten im Sinne der vorgestellten Grundidee wurde eine Matlabanwendung programmiert. Im Fenster des zentralen Hauptprogramms wählt der Anwender die zu verarbeitenden Datensätze bzw. Dateien aus und ruft danach sequentiell alle Teilschritte der Auswertung auf, die im Folgenden vorgestellt werden.
Geländeapproximation
Aus einzelnen Geländepunkten wird im Unterprogramm Geländeapproximation eine Approximationfläche dritter Ordnung berechnet. Die Parameter, die die Form der zu bestimmenden Fläche definieren, während in einer Ausgleichung nach der Methode der kleinsten Quadrate bestimmt. Die Summe der quadrierten Höhenabweichungen von gemessenen Geländepunkten zur ausgeglichenen Fläche wird so minimiert.
Die resultierende Fäche wird dem Anwender zusammen mit den gemessenen Punkten als dreidimensionales Gittermodell angezeigt. Zusätzlich wird in einem Textfeld die Wurzel der mittleren quadratischen Höhenabweichung (Root Mean Square Error) als Qualitätsmass für die Angepasstheit des Geländemodells ausgegeben.
Synchronisierung
Im Unterprogramm Synchronisierung (ohne Bild) werden Lagedaten des Falcons und Thermalbilder zeitlich synchronisiert und für jedes Einzelbild interpolierte Lagedaten errechnet. Als Synchronisationssignal zur Herstellung des bislang unbekannten Zeitbezuges zwischen Bild- und Lagedaten dienen charakteristische Schwenks der Kamerahalterung. Diese werden vor und nach dem Bildflug durchgeführt und sind sowohl in den Bilddaten wie auch in den Lagedaten erkennbar. Für jedes Einzelbild des Thermalvideos wird der Aufnahmezeitpunkt errechnet und aus den alle 0.5 s erfassten Lagedaten die genaue Position und Orientierung des Falcon zum Aufnahmezeitpunkt interpoliert.
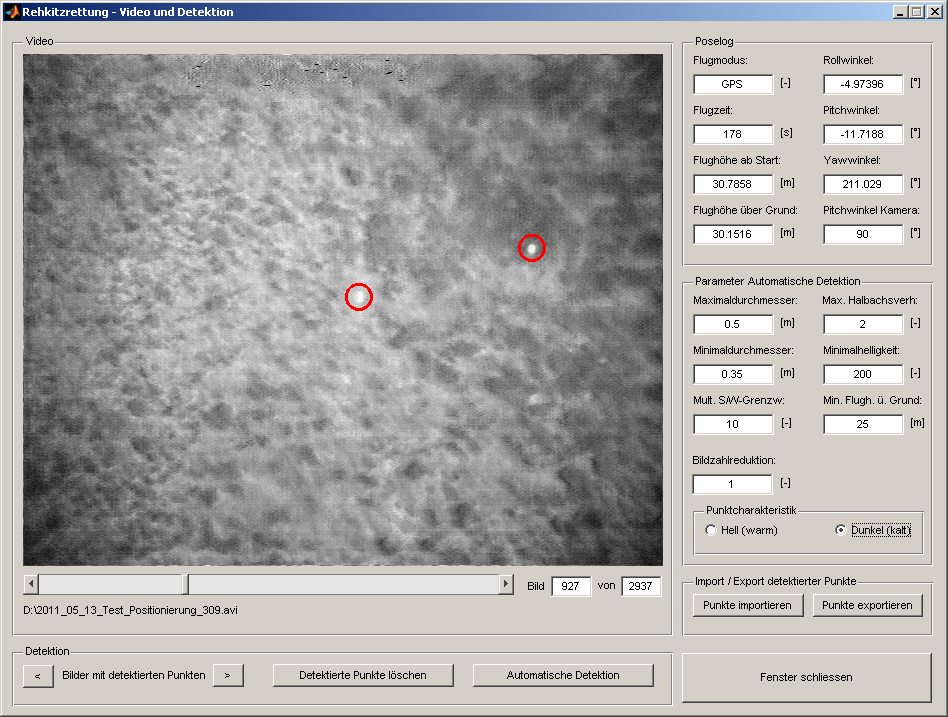
Detektion
Die Suche von Rehkitzen in den Thermalbildern erfolgt im Unterprogramm Video und Detektion. Ein Schieberegler erlaubt es, zu beliebigen Einzelbildern des Videos zu springen und in diesen durch Klick ins Infrarotbild manuell Rehkitze zu markieren. Ein Suchalgorithmus ermöglicht aber auch die automatische Erkennung von hellen Flecken bzw. Rehkitzen. Vom Originalbild wird dazu eine weichgezeichnete Version subtrahiert. Das resultierende Bild enthält nur noch kleine Objekte, die heller sind als ihre Umgebung. Dieses Bild wird wiederum in ein Schwarz-Weiss-Bild umgewandelt. Für alle weissen Pixelgruppen im entstehenden Bild werden Kenngrössen wie Fläche oder Helligkeit im Originalbild berechnet und mit den vom Nutzer festgelegten Grenzwerten verglichen. Die Schwerpunkte von Pixelgruppen, die sämtliche Kriterien für eine Klassifizierung als Rehkitz erfüllen, werden für die Weiterverarbeitung gespeichert.
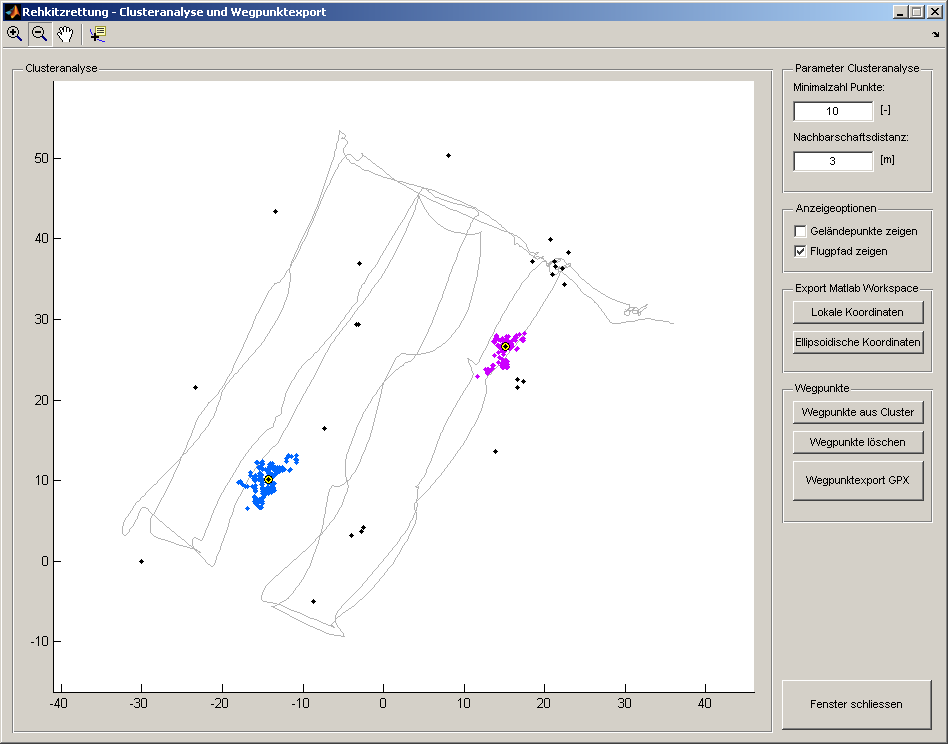
Clusteranalyse und Wegpunktexport
Die von den Rehkitzkandidaten in allen Bildern ausgehenden Aufnahmestrahlen ergeben, geschnitten mit dem Geländemodell, eine dreidimensionale Punktwolke. Aussichtsreiche Kandidaten manifestieren sich in dieser als dichtere Ansammlungen. Im Unterprogramm Clusteranalyse und Wegpunktexport wird mittels des Algoritmus DBSCAN nach solchen Ansammlungen oder Clustern gesucht. Die Parameter, mit denen bestimmt wird, ab welcher Dichte eine Ansammlung von Punkten als Cluster gilt, können vom Anwender verändert werden.
Für jeden Cluster wird eine Mediankoordinate errechnet, die als wahrscheinlichste Position des durch den Cluster repräsentierten Rehkitzes gilt. Diese Koordinate wird später als Wegpunkt für die Suche im Feld auf ein GNSS-Handgerät übertragen. Der Anwender kann durch Klick in die zweidimensionale Clusterdarstellung manuell Wegpunkte hinzufügen und entfernen.

Approximation des Geländemodells
Detektion von Rehkitzen in Thermalbildern
Clusteranalyse und Wegpunktexport